
.jpg)
|
Ρομποτική Αρθροπλαστική Γόνατος (PKR-MAKOplasty & TKR-MAKOplasty) Με τα χρόνια, οι τεχνικές αντικατάστασης του γόνατος έχουν υποστεί πολλές βελτιώσεις. Η τεχνική MAKOplasty που βασίζεται στην χρήση της τεχνολογίας του ρομποτικού βραχίονα (MAKO Robotic-Arm Assisted Technology) είναι ένα παράδειγμα του τρόπου με τον οποίο η τεχνολογία έχει μετασχηματίσει τον τρόπο με τον οποίο εκτελούνται οι αρθροπλαστικές του γόνατος σήμερα.
Η ρομποτική τεχνολογία MAKO σχεδιάστηκε για να βοηθάει τους χειρουργούς να παρέχουν στους ασθενείς μια εξατομικευμένη επέμβαση με βάση τη συγκεκριμένη διάγνωση και ανατομία τους. Η MAKOplasty αποτελεί σήμερα την πιο εξελιγμένη μέθοδο σχεδιασμού και πραγματοποίησης αρθροπλαστικών του γόνατος, η οποία όταν συνδυάζεται και με συμβατές τεχνικές ελάχιστης επεμβατικότητας όπως η τεχνική Quad Sparing προσφέρει στον ασθενή το βέλτιστο κλινικό αποτέλασμα.
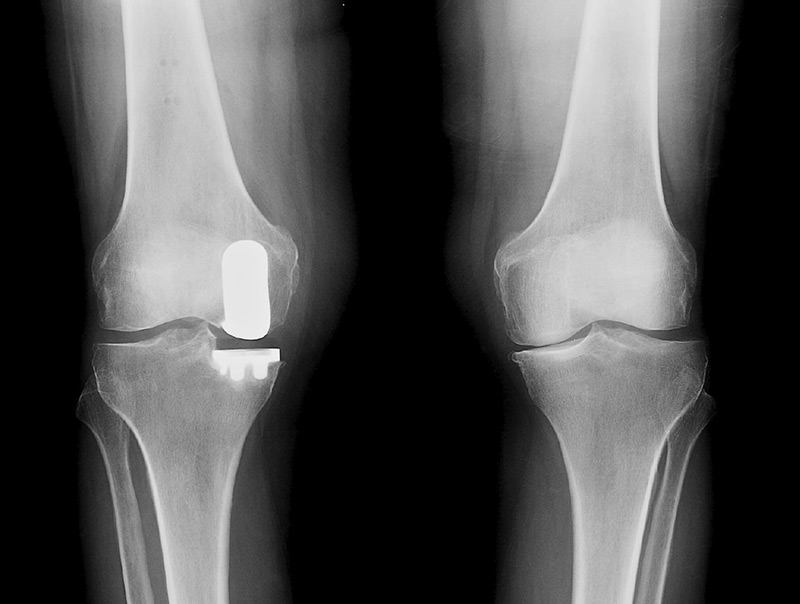
Η τεχνική MAKOplasty αποτελεί την μόνη ρομποτική τεχνική για την πραγματοποίηση τόσο μερικής αρθροπλαστικής του γόνατος (PKR-MAKOplasty) όσο και ολικής αρθροπλαστικής του γόνατος (TKR-MAKOplasty)
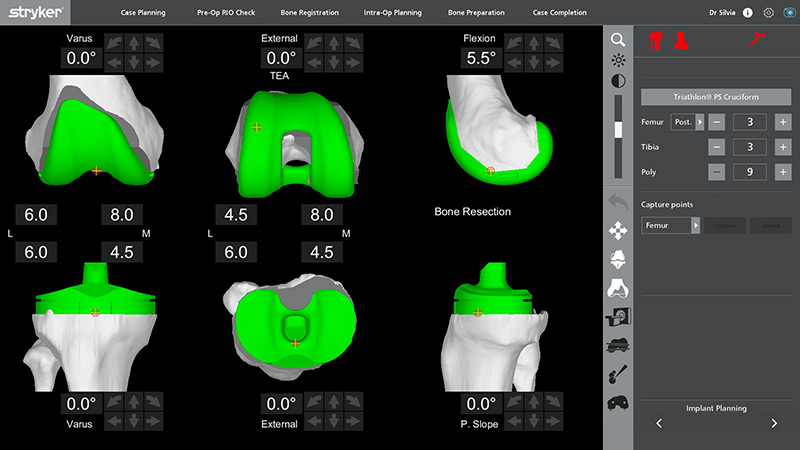
Όταν μιλάμε για την τεχνική MΑΚΟplasty είναι σημαντικό να ξεκαθαρίσουμε ότι ο ρομποτικός βραχίονας δεν εκτελεί μόνος του τη χειρουργική επέμβαση. Η χειρουργική επέμβαση εκτελείται από τον ορθοπαιδικό χειρουργό, ο οποίος αρχικά χρησιμοποιεί το λογισμικό του συστήματος MAKO για να σχεδιάσει προ-εγχειρητικά ένα λεπτομερές τρισδιάστατο (3D) πλάνο της χειρουργική επέμβασης.
Στην συνέχεια ο ορθοπεδικός χειρουργός είναι αυτός που θα καθοδηγήσει το ρομποτικό βραχίονα για την απομάκρυνση του παθολογικού οστού και την εισαγωγή του εμφυτεύματος.
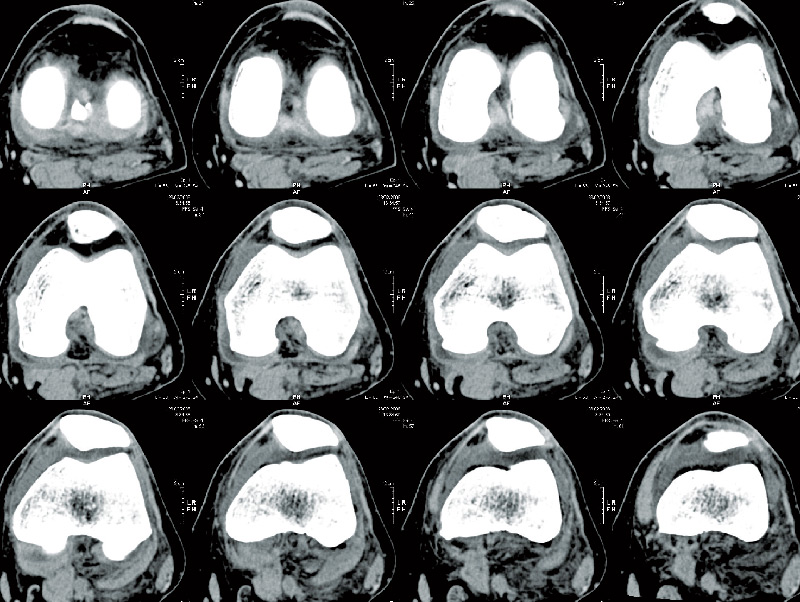
Στην ρομποτικά υποβοηθούμενη αρθροπλαστική (MAKOplasty) όλα ξεκινάνε προεγχειρητικά με μια πολύ υψηλής ανάλυσης αξονική τομογραφία (CT) με την οποία γίνεται η ακριβής αποτύπωση της ανατομίας του γόνατος του κάθε ατόμου σε ένα τρισδιάστατο (3D) μοντέλο.
Αυτό το μοναδικό για τον κάθε ασθενή μοντέλο χρησιμοποιείται στη συνέχεια, αφενός για την δημιουργία ενός στερεοτακτικού παραθύρου (απαραίτητο για την ακριβή αφαίρεση του παθολογικού οστού), αφετέρου για την επιλογή του ιδανικού μεγέθους του εμφυτεύματος και την τοποθέτησή του με τέτοιο τρόπο ώστε να επιτευχτεί η επιθυμητή μετεγχειρητική κάλυψη των οστών και η σωστή ευθυγράμμιση του σκέλους.
Διεγχειρητικά, ο ρομποτικός βραχίονας παρέχει οπτικό, ακουστικό και απτικό έλεγχο για να διασφαλιστεί ότι ο χειρουργός κατά την αφαίρεση του παθολογικό οστού δεν θα κινηθεί εκτός του προκαθορισμένου στερεοτακτικού παράθυρου. Η λειτουργία του κοπτικού εκτός αυτού του στερεοτακτικού παραθύρου είναι περιορισμένη, με αποτέλεσμα να βοηθά στη διατήρηση του μέγιστου φυσικού οστικού αποθέματος και στην ελαχιστοποίηση της βλάβης των περιαρθρικών μαλακών μορίων.
Τέλος στην MAKOplasty χρησιμοποιείται ένα σύστημα δυναμικών αναφορών για την διεγχειρητική εκτίμηση του εύρους κίνησης και της ευθυγράμμισης του σκέλους, επιτρέποντας έτσι στον χειρουργό να πραγματοποιεί επιτόπιες τροποποιήσεις στην αφαίρεση του οστού, στην απελευθέρωση των μαλακών μορίων και στην εμφύτευση μοσχευμάτων.
Μελέτες έχουν δείξει ότι σε σύγκριση με τη συμβατική αρθροπλαστική, η Ρομποτικά Υποβοηθούμενη Αρθροπλαστική (MAKOplasty) συνδέεται με τη ακριβέστερη τοποθέτησης και ευθυγράμμιση των εμφυτευμάτων, προσφέρει προστασία στους μαλακούς ιστούς γύρω από την άρθρωση και συμβάλει στην περαιτέρω βελτίωση της πρώιμης λειτουργικής ανάρρωσης και στη μείωση του χρόνου νοσηλείας στο νοσοκομείο. Πρέπει να τονισθεί ότι τεχνική MAKOplasty εγγυάται την σωστή τοποθέτηση της πρόθεσης και όχι το κλινικό αποτέλεσμα του χειρουργείου, δηλαδή αποτελεί μια δικλίδα ασφαλείας για τους ορθοπαιδικούς (μη ειδικούς χειρουργούς ισχίου και γόνατος) που πραγματοποιούν αρθροπλαστικές. Το βραχυπρόθεσμο και μακροπρόθεσμο αποτέλεσμα της αρθροπλαστικής σχετίζεται άμεσα με την εμπειρία και την εξειδίκευση του χειρουργού μέσα από την οποία προκύπτει και η ικανότητά του να συνδυάζει την τεχνολογία MAKO με άλλες συμβατές τεχνικές ελάχιστης επεμβατικότητας όπως η τεχνική Quad Sparing.
|
|||




Πίσω